Корабль-перевертыш (02.10.2015)
[vsw id=»http://www.youtube.com/watch?v=tQxQfQU_hsk» source=»youtube» width=»425″ height=»344″ autoplay=»no»]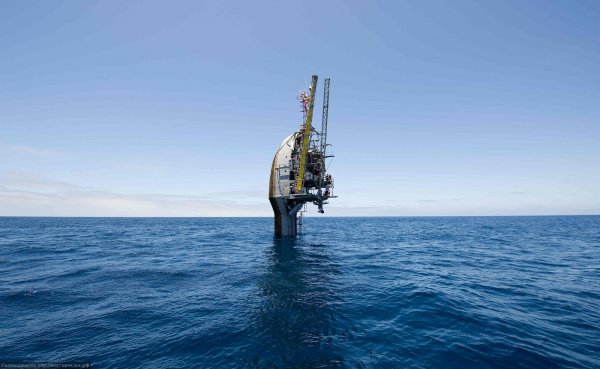
FLIP (Floating Instrument Platform — «Плавучая инструментальная платформа») — удивительное судно, способное находиться на воде как в горизонтальном, так и в вертикальном положении. Исследовательский корабль, разработанный двумя учеными из американского Института океанографии Скриппса и построенный в 1962 году, вызывает удивление и почти полвека спустя. Как судно длиной более 100 м может наклоняться на 90 градусов?

Единственный в мире корабль-перевертыш FLIP был разработан для акустических исследований океана, но сейчас он стал более многопрофильным: с его помощью изучаются штормовые и сейсмические активности, собираются данные о температуре, плотности и циркуляции воды и др.
У судна нет двигателя, поскольку его шум мешал бы слушать звуки океана, в том числе подслушивать «разговоры» морских животных. Поэтому корабль всегда путешествует на буксире: его привозят в нужное место, и уже там он принимает вертикальное положение и приступает к работе.
Flip в переводе с английского означает «сальто», «переворот», еще одно значение под стать судну — «дерзкий». Вместе с кораблем меняют положение и люди на борту: когда хвост — 91 м нежилой площади — уходит под воду, команда занимает места на носу и наблюдает за погружением. Над водой остается лишь верхняя часть палубы длиной 17 м и шириной 7,9 м.

Внутри рабочих и жилых помещений на носу корабля все подстраивается под новое положение. Некоторые элементы дублируются на стенах — например, раковины. А некоторые переставляются — например, кровати, оказавшиеся на стене, члены команды опускают на пол, а специально сконструированные унитазы разворачивают под нужным углом. Для людей «сальто» корабля не создает больших трудностей, так как оно происходит достаточно медленно: угол в 90 градусов преодолевается примерно за полчаса.
О том, как технически устроен корабль-перевертыш и как он меняет положение из горизонтального в вертикальное и обратно, мы спросили у специалиста из Института океанографии Скриппса, где и было разработано это инженерное чудо.
Cubli: роботизированный куб с почти совершенной балансировкой (25.09.2015)

Разные компании выпускают достаточно большое количество игрушек и гаджетов, способных балансировать при разных условиях. В том же СССР еще выпускали пластиковую птицу, которая опиралась на основу лишь клювом, довольно тонким, а все «тело» находилось в воздухе. На днях в Сети появилось видео с демонстрацией работы роботизированного «куба», способность которого к балансу весьма высока.
Этот «куб» может балансировать на любом из углов, причем не только на горизонтальной поверхности, но и на поверхностях с сильным наклоном. Кроме того, это устройство может соблюдать равновесие даже при кружении на одном из углов.
Создали этот девайс специалисты из Цюрихского института, ETH Institute for Dynamic Systems and Control. Внутри Cubli — три вращающихся колеса, каждое из которых отвечает за баланс определенной области. Кроме того, внутри устройства расположено и небольшое вычислительное устройство, которое просчитывает скорость, с которой должны вращаться колеса, чтобы куб мог балансировать.
По мнению разработчиков, Cubli может пригодиться для работы в космических программах и робототехники. Ниже — видео с демонстрацией возможностей Cubli.
[vsw id=»n_6p-1J551Y» source=»youtube» width=»425″ height=»344″ autoplay=»no»]MTRAN3 Modular Robot-Модульный или само-реконфигурируемый робот (23.09.2015)
[vsw id=»mUMXl22QAqE» source=»youtube» width=»425″ height=»344″ autoplay=»no»]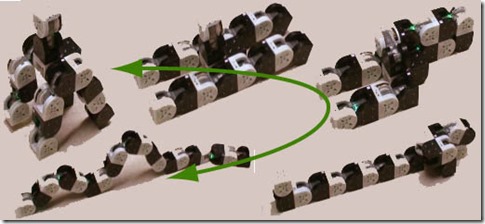 Модульный или само-реконфигурируемый робот. Замечательная и очень занимательная игрушка на которую можно наблюдать часами (уж очень он медленный), тем не менее это его не портит. Это фактически механические клетки способные собираться вместе и строить из себя различные механические организмы: гусениц, пауков и другие, ни на что не похожие, конструкции. Если несколько таких модулей рассыпать на полу, клетки сползутся вместе и соединяться сами в жизнеспособный организм. Это невероятно но это есть, это работает. Смотреть на это лучше на видео при ускоренном воспроизведении раз в 6 – 8. А сколько организмов может вырасти из нескольких таких механических клеток, и каждый может довольно уверенно передвигаться и преодолевать препятствия.
Модульный или само-реконфигурируемый робот. Замечательная и очень занимательная игрушка на которую можно наблюдать часами (уж очень он медленный), тем не менее это его не портит. Это фактически механические клетки способные собираться вместе и строить из себя различные механические организмы: гусениц, пауков и другие, ни на что не похожие, конструкции. Если несколько таких модулей рассыпать на полу, клетки сползутся вместе и соединяться сами в жизнеспособный организм. Это невероятно но это есть, это работает. Смотреть на это лучше на видео при ускоренном воспроизведении раз в 6 – 8. А сколько организмов может вырасти из нескольких таких механических клеток, и каждый может довольно уверенно передвигаться и преодолевать препятствия.
На самом деле это целое направление робототехники и первый образец был построен в конце восьмидесятых готов прошлого века, даже существуют летающие модели, каждый модуль может летать и соединятся в воздухе!!!
Это действительно замечательная игрушка и даже больше, модули можно конфигурировать с помощью компьютерной программы в различные организмы, и все ограниченно только полетом фантазии (и толщиной кошелька к сожалению).
Ребенок имея такую игрушку сможет придумывать различные конструкции и это никогда ему не надоест, будут приходить все новые и новые идеи.
Кроме того механические организмы реагируют на препятствие и на ускорение, имеют встроенный магнитный компас. Такое количество датчиков позволяет создать очень функциональные и подвижные механизмы.
А если пофантазировать то из таких кубиков возможно вырастить и искусственный интеллект. Каждый модуль обладает микропроцессором и может соединяться с другими модулями и обмениваться информацией. Нужно только достаточное количество этих модулей, и возможность видоизменяться, и возможно все получиться.
Источник.http://zekom.ru
Индивидуальное мобильное устройство (22.09.2015)
[vsw id=»p23Dh_fR8gQ» source=»youtube» width=»425″ height=»344″ autoplay=»no»]Aisin Seiki Co Ltd and Chiba Institute of Technology институт представил «ILY-A» трехколесный электромобиль для одного человека 17 марта 2015 года. Автомобиль, который выглядит как велосипед, может быть преобразован в четыре формы в соответствии с нуждами и задачами пользователя. Например, он может быть электрическим приводом и двигаться, как скутер. И он может быть трансформирован в корзину для переноски багажа. Айсин Сейки и университет коммерциализируют проект транспортного средства в течение пяти лет в качестве «персонального мобильного устройства», которое может служить в различных ситуациях.
 Наиболее отличительной чертой устройства является то, что оно может быть преобразовано в четыре различные формы в соответствии с ситуациями: (1) «автомобиль», в котором он приводится в действие электродвигателем, (2) «Самокат » в котором он может работать как самокат (3) «корзина» в котором он может перевозить багаж, как телега и (4) «Переноска», в котором оно находится в сложенном виде для транспортировки его.
Наиболее отличительной чертой устройства является то, что оно может быть преобразовано в четыре различные формы в соответствии с ситуациями: (1) «автомобиль», в котором он приводится в действие электродвигателем, (2) «Самокат » в котором он может работать как самокат (3) «корзина» в котором он может перевозить багаж, как телега и (4) «Переноска», в котором оно находится в сложенном виде для транспортировки его.
«Мы надеемся, что он будет использоваться не только для поддержки пожилых людей и инвалидов, но и молодежи», — сказал Takaaki Furuta, исполнительный директор Chiba технологического института и руководитель будущего робототехническо-технологического центра (fuRo).
На этот раз,Chiba технологический институт добавил функции безопасности с помощью инфракрасного датчика установленного в ILY-A, когда устройство работает в режиме транспортное средство и препятствие появляется, он автоматически останавливается, чтобы предотвратить аварии. Кроме того, в толпе или месте, где есть много препятствий, автомобиль автоматически снижает скорость в соответствии с окружающими условиями (функция автоматического снижения скорости ).
Робот-трансформер Halluc IIx c восемью лапами-колесами (21.09.2015)
[vsw id=»-GGF9EsxUiA» source=»youtube» width=»425″ height=»344″ autoplay=»no»]
Подразделение Future Robotics Technology Centre из японского технологического института Chiba работает над созданием различных прототипов, которые могут преобразить в будущем само понятие привычного транспорта. Очередной их разработкой стал второй вариант робота Halluc IIx (первый был представлен еще в 2007 году). Робот представляет из себя нечто похожее на краба с восемью лапами, которые могут всяко поворачиваться и превращаться в колеса, что делает его универсальным в плане передвижения в любых условиях:
Робот-велосипедист PRIMER-V2 (09.09.2015)
Японская игрушечная компания Dr. Geuro продемонстрировала результат своего любопытного эксперимента — миниатюрного робота, который умеет ездить на велосипеде. Машина получила название PRIMER-V2, робот-велосипедист отличается тем, что он держится на двухколесном транспортном средстве и смотрится почти так же, как живой человек.

PRIMER-V2 может разгоняться до скорости 10 км/ч, он удерживает равновесие при помощи центробежной силы переднего колеса, а также гироскопа, который помогает роботу рулить, двигаясь по прямой линии. Глядя на робота в действии, его можно сравнить с ребенком, который только что научился ездить на велосипеде и получает удовольствие от новых ощущений. Забавно смотрится и то, как он тормозит — просто прижимает к земле свои железные ноги. Если детишки будут брать с него пример, то родителям, вероятно, придется покупать своим отпрыскам ботинки со стальными носками, чтобы сэкономить на кроссовках.
[vsw id=»v5wIdlIym_I» source=»youtube» width=»425″ height=»344″ autoplay=»no»]Машина работает на дистанционном управлении, и оператору приходится потратить какое-то время, чтобы привыкнуть к нему. Самым сложным трюком, как говорят разработчики, является остановка машины, труднее всего заставить робота прижать ноги к земле, а все остальное осуществляется предельно просто, это примерно то же самое, что и ездить на велосипеде самому.
Лазающий робот: Rise от Boston Dynamics (09.09.2015)
[vsw id=»XEMlkonimvQ» source=»youtube» width=»425″ height=»344″ autoplay=»no»]Маленький шестилапый робот, по имени RiSE, способен взбираться на любые поверхности без каких-либо сложностей. Скорость этого робота составляет всего 0,3 м/с., весит два килограмма, а также имеет длину, которая составляет 0,25 метра, может взбираться по стенам, деревьям, заборам, в целом по всем вертикальным поверхностям.
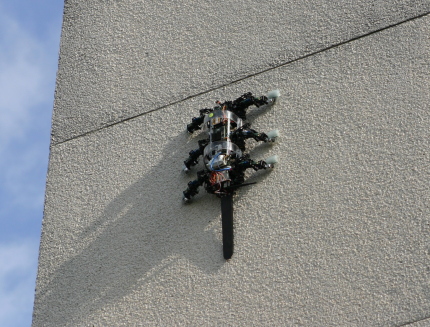 С помощью когтей, которые находятся на лапах, RISE может ползти по различным поверхностям. Эти когти меняются в зависимости от поверхности и наклона, так они могут быть острыми, липкими, большими или маленькими когтями.
С помощью когтей, которые находятся на лапах, RISE может ползти по различным поверхностям. Эти когти меняются в зависимости от поверхности и наклона, так они могут быть острыми, липкими, большими или маленькими когтями.
 RISE автоматически приспосабливается к разным поверхностям. Благодаря хвосту он поддерживает равновесие, а также хвост помогает для взбирания вверх.
RISE автоматически приспосабливается к разным поверхностям. Благодаря хвосту он поддерживает равновесие, а также хвост помогает для взбирания вверх.
 В каждой лапе у робота имеются по два электромотора. С помощью бортовых компьютеров определяется поверхность, наклон и многое другое.
В каждой лапе у робота имеются по два электромотора. С помощью бортовых компьютеров определяется поверхность, наклон и многое другое.
Также скоро должна появится новая версия RISE, которая будет оснащена новыми лапами. С помощью них робот сможет карабкаться по любым поверхностям, таким как: стекло или супер гладкая вертикальная поверхность.
Модульный робот-змея университета Карнеги-Меллон(07.09.2015)
[vsw id=»oat582SaTko» source=»youtube» width=»425″ height=»344″ autoplay=»no»]Лаборатория бионики университета Карнеги-Меллон разрабатывает интересного змеевидного робота, способного не только ползать по земле и грязи, плавать, но и взбираться вверх по деревьям и столбам, по ступенькам, внутри полых труб и узких щелей, обхватывать предметы в броске. Основное направление исследований — разработка новых способов передвижения, или «походок», если так можно назвать манеру передвижения змеи. Текстовой информации об устройстве и процессе разработки робота на сайте проекта немного, но зато есть очень много видеороликов.Используя акселерометры, робот определяет момент удара о препятствие и сжимается вокруг него.
Бионический робот-кенгуру от FESTO (03.09.2015)
[vsw id=»_4luJ0ZSqy8″ source=»youtube» width=»425″ height=»344″ autoplay=»no»]жегодно компания Festo в рамках проекта «Bionic Learning Network» демонстрирует необычные и увлекательные машины, использующие созданные природой принципы как основу для технических решений. В результате посетители шоу и выставок, в которых участвует Festo, могут любоваться различными робоживотными, включая, пожалуй, самое известное творение Festo — чайку SmartBird.
Проект BionicKangaroo до недавнего времени оставался тайной компании, но теперь Festo продемонстрировала робота, имитирующего прыжки кенгуру, в частности, механизм «рекуперации» — использования энергии одного прыжка для совершения следующего. Без этой способности настоящие кенгуру очень быстро выбились бы из сил, но их сухожилия, работающие как пружины, позволяют животным долгое время двигаться с высокой скоростью.
BionicKangaroo реализует этот принцип, используя настоящие пружины, запасающие механическую энергию при приземлении и высвобождающие при следующем прыжке. Робот весом 7 кг и высотой 1 м может прыгнуть на 80 см по горизонтали и на 40 см вверх — весьма впечатляющий результат. Да, с точки зрения зоологии было бы корректнее назвать робота не кенгуру, а валлаби — более мелким представителем того же семейства.

Для питания пневматической системы, приводящей робокенгуру в движение, используется небольшой компрессор или пневмоаккумулятор. Электронные компоненты (в том числе датчики и другие элементы кинематической системы, позволяющей роботу сохранять равновесие) питаются от легких батарей. Управление осуществляется с помощью повязки MYO, считывающей миоэлектрические сигналы с предплечья оператора
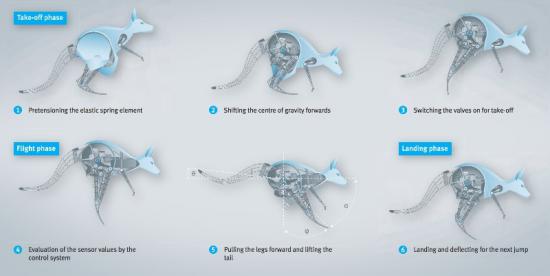
Перед первым прыжком эластичные «сухожилия» пневматически натянуты. BionicKangaroo смещает центр тяжести вперед и начинает наклоняться. При достижении определенного угла наклона и соответствующей угловой скорости пневматические цилиндры активируются, энергия пружин-«сухожилий» высвобождается — и кенгуру отрывается от земли.
В прыжке BionicKangaroo вытягивает лапы вперед, компенсируя возникающий крутящий момент движением хвоста.
При приземлении «сухожилие» натягивается снова, преобразуя кинетическую энергию в потенциальную, которая будет использована при следующем прыжке, а хвост возвращается в исходную позицию

Первый в мире летающий мотоцикл Hoverbike (31.08.2015)
[vsw id=»bpko3CPHonQ» source=»youtube» width=»425″ height=»344″ autoplay=»no»]
Австралийский инженер Крис Маллой (Chris Malloy) утверждает, что именно он осуществит мечту нескольких поколений читателей фантастических книг и зрителей фантастических фильмов. Ведь он создал уже вполне работающий прототип летающего мотоцикла — Hoverbike.

Пока что Маллой провел лишь самые первые испытания своего летающего мотоцикла, во время которых байк был прикреплен к земле четырьмя веревками. Но в скором будущем он планирует провести и полноценные, полномасштабные полеты на Hoverbike, оснастив его для безопасности парашютом.
Если все эти испытания пройдут успешно, Крис Маллой планирует продавать летающие мотоциклы Hoverbike по 40 тысяч американских долларов за штуку. Емкость же рынка он оценивает в тысячу мотоциклов в год.
MorpHex — робот сфера (28.08.2015)
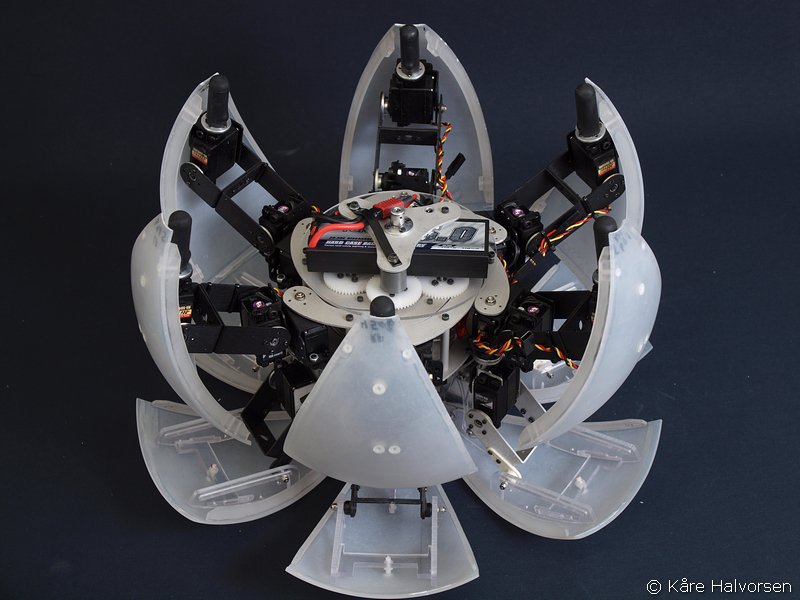
[vsw id=»HuC6q9kbryw» source=»youtube» width=»425″ height=»344″ autoplay=»no»]Известный норвежский инженер, который прославился своими работами в робототехнике, представил нового катающегося робота-трансформера, который будто бы пришел к нам прямо из сновидений. Необходимо отметить, что многие роботы норвежского «Кулибина» попросту пугают — это и двуногий Archer, и скорпионообразный робот A-pod и его усовершенствованная версия FireAnt, а также паукообразный робот. Однако, прежде всего, все они — это потрясающие образцы технической мысли. Новый робот Халворсена MorpHex MKII разделен на большое количество секций, каждая из которых имеет по два мотора. Этот робот в состоянии катиться по земле. В нужный момент он может раскрыться и превратить свои панели в ноги, с помощью которых он сможет ходить.
Необходимо отметить, что создателю MorpHex MKII удалось спроектировать и построить такое устройство, которое корректнее всего было бы назвать двойным гексаподом за количество имеющихся у него конечностей, число которых в сумме достигает 12. Конструктор из Норвегии дал своей новой модели обозначение MKII, в отличие от робота-предшественника с обозначением MKI, который мог перемещаться лишь кругами, новый робот может кататься и по прямой. По словам конструктора, управлять роботом — это все равно, что водить радиоуправляемый автомобиль.
При этом, невзирая на некоторую внешнюю несерьезность моделей, все роботы Халворсена — это элегантно спроектированные, прекрасные и одни из самых продвинутых в мире малых роботов на данный момент. Все его конструкции определенно стоят того, чтобы с ними познакомиться поближе — особенно видео в Интернете, на которых роботы его конструкции сражаются друг с другом. Его дроны могут сбиваться в стаи, держаться вместе, образуя колонии. Смотря на них, понимаешь, что, возможно, видишь ближайшее будущее.
 орвежский инженер-конструктор Каре Халворсен (Kare Halvorsen) получил известность во всемирной сети благодаря специализированному сообществу Trossen Robotics Community, где он был зарегистрирован под ником Zenta. При этом создание роботов и робототехника — это лишь его хобби. Он может и умеет создавать роботов с программируемой архитектурой, отличающихся оригинальной конструкцией и внешним видом. При этом вдохновение норвежец черпает из «природной инженерии». Как для конструктора любителя, Халворсену удалось добиться очень завораживающей реалистичности и точности движений своих устройств.
орвежский инженер-конструктор Каре Халворсен (Kare Halvorsen) получил известность во всемирной сети благодаря специализированному сообществу Trossen Robotics Community, где он был зарегистрирован под ником Zenta. При этом создание роботов и робототехника — это лишь его хобби. Он может и умеет создавать роботов с программируемой архитектурой, отличающихся оригинальной конструкцией и внешним видом. При этом вдохновение норвежец черпает из «природной инженерии». Как для конструктора любителя, Халворсену удалось добиться очень завораживающей реалистичности и точности движений своих устройств.
Его новейшая разработка, видео и фотографии которой не так давно появились в Интернете, это MorpHex. Название представляет собой комбинацию слов morphing hexapod — «трансформируемый гексапод». Новый робот — это шестиногий аппарат (корректнее было бы назвать его двенадцатиногим), который заключен в корпус в форме сферы. В планах создателя было научить своего робота передвигаться подобно крабу. Из робота, обладающего шестью конечностями, он может легко трансформироваться в сферу и двигаться в нужном направлении. С одной стороны, работы Халворсена кажутся довольно простыми, но это ощущение складывается из-за простоты дизайна, тогда как их разработка требует серьезного багажа технических знаний и инженерных навыков.
С точки зрения технологии и начинки его робот совсем не прост. В данном устройстве было задействовано 25 серводвигателей, каждый из которых имеет индивидуализированное сцепление (используется 12 приводов типа 5990 и 13 приводов модели 5645 производства компании Hitec). Помимо этого, в роботе имеется встроенная плата контроллера ARC-32 производства Basicmicro, аккумуляторы LiPo 2S мощностью 5000 мАч, радиомодули XBee и регулятор Turnigy на 8А.
 аблюдая за данным роботом, кажется, что раньше ты его уже видел, но только в качестве персонажа компьютерной игры или научно-фантастического фильма. Однако представленная им конструкция уникальна. Роботизированный механизм удачно объединяет в себе функции робота с шестью конечностями — гексапода и устройства-трансформера. При этом детище Халворсена корректнее было бы назвать двойным гексаподом, так как в сумме количество условных конечностей данного устройства достигает 12, но в раскрытом состоянии для перемещения используются лишь 6.
аблюдая за данным роботом, кажется, что раньше ты его уже видел, но только в качестве персонажа компьютерной игры или научно-фантастического фильма. Однако представленная им конструкция уникальна. Роботизированный механизм удачно объединяет в себе функции робота с шестью конечностями — гексапода и устройства-трансформера. При этом детище Халворсена корректнее было бы назвать двойным гексаподом, так как в сумме количество условных конечностей данного устройства достигает 12, но в раскрытом состоянии для перемещения используются лишь 6.
В отличие от многих других работ автора, его новый робот выглядит вполне дружелюбным, особенно забавно смотрятся его уверенное, хотя и не очень быстрое передвижение при помощи своих лап-манипуляторов. Управление роботом осуществляется с помощью пульта ДУ, который подобен тем, что применяются для осуществления контроля за радиоуправляемыми вертолетами или автомобилями.
Робот в сложенном состоянии представляет собой сферу-шар, которая обладает большой свободой для передвижения не только по окружности, но и может уверенно преодолевать достаточно большие участки по прямой. Робот MorpHex MKII без особых проблем может скатываться даже с уклонов, не повреждая при этом свои внутренние механизмы, а также в состоянии достаточно быстро перемещаться в полураскрытом состоянии, перемещаясь по ровной поверхности в разные стороны. Роботизированный механизм устройства представляет собой несколько секций, обладающих двумя сервомоторами в каждой, благодаря чему он в состоянии в уже разложенном состоянии преодолевать достаточно труднопроходимую для изделия подобной конструкции местность.
Стоит отметить, что гексаподы достаточно давно полюбились специалистам, которые работают в области создания роботов. Похожие на пауков машины разрабатывались не только в виде маленьких «карманных» роботов, но и в виде гигантских конструкций, которые имели возможность пилотирования изнутри. На данном этапе в планах Каре Халворсена стоит аппаратная доработка своего нового робота, причиной чему стала поломка одного сервомотора во время прохождения тестовых испытаний робота, а также корректировка его программной составляющей.
Источник http://topwar.ru
………………………………………………………………………………………………………………………………………………………………………………..
[vsw id=»BGOUSvaQcBs» source=»youtube» width=»425″ height=»344″ autoplay=»no»]Hubo — это бипедальный робот, разработанный южнокорейской командой KAIST специально для участия в роботехническом конкурсе DARPA’s 2015 Robotics Challenge, проходившем в Помоне (Калифорния, США). Ключевая задача конкурса — показать, насколько эффективно роботы могут справляться с разным набором поставленных задач. И при этом большинство этих задач они должны выполнить в автономном режиме. Например, им было необходимо прокатиться на автомобиле, открыть несколько дверей, преодолеть полосу препятствий, повернуть кран и подняться по лестнице — это, пожалуй, самое сложно испытание для бипедальных гуманоидных роботов.
Hubo соревновался в 22 другими роботами и в конце концов победил их всех. На прохождение всех испытаний у него ушло 44 минуты и 28 секунд, что принесло его создателям 2 миллиона долларов в качестве приза.
Успеху Hubo во многом обязан своим трансформационным способностям. Робот способен ходить на двух ногах, но для более уверенного и быстрого передвижения он садится на коленки и двигается с помощью установленных на них колесах. Помимо этого, робот может вращать своим торсом, что помогает в выборе различных направлений без необходимости поворота всего робота.
…………………………………………………………………………………………………………………………………………………………………………………………………………………………………
[vsw id=»JJxd32NS7-A» source=»youtube» width=»425″ height=»344″ autoplay=»no»]Loopwheels — колесо, изобретенное заново
Сэм Пирс, британский дизайнер, выступил с громогласным заявлением, что он «изобрел колесо». И он ничуть не преувеличивает. Его изобретение — колесо Loopwheels без спиц, которое обладает феноменальными амортизирующими свойствами. Колеса Loopwheels были недавно номинированы Лондонским музеем дизайна на награду «Дизайн года». Предполагается, что использование инновационных колёс позволит вывести на новый уровень комфорт езды на велосипедах, а также в детских и инвалидных колясках. Пирс — изобретатель и дизайнер, который ранее работал с оборудованием не-инвазивной хирургии, ранними карманными ПК эпохи Palm Pilot и мотоциклами. Он всю жизнь старался привнести что-то новое в обыденные вещи. В 2007 году изобретатель начал работать над усовершенствованием детских колясок после того как, ожидая своего рейса в аэропорту в Нидерландах, заметил женщину с детской коляской. Колесо коляски попало на бордюр, и ребенок едва не выпал из нее. После этого Пирсу впервые в голову пришла идея встроить в колеса рессоры. После ряда неудачных экспериментов Пирс и его команда Jelly Products создали колесо, в котором обычные спицы заменили на гибкие рессоры из углепластика. При этом система Loopwheels совместима с большинством стандартных деталей. Для запуска проекта в производство необходимо было собрать 40 000, и Пирс разместил объявление на одной из краудфандинговых площадок. В очень короткий срок было собрано в полтора раза больше денег, чем необходимо. Все желающие могли оформить предзаказ за 420. В эту стоимость входили заднее и переднее 20-дюймовые колеса, трехскоростная планетарная втулка и футболка с фирменным логотипом.
…………………………………………………………………………………………………………………………………………………………………………………………………………………………………
[vsw id=»xVRUtzquBa8″ source=»youtube» width=»425″ height=»344″ autoplay=»no»]
…………………………………………………………………………………………………………………………………………………………………………………………………………………………………
[vsw id=»cdgQpa1pUUE#t=72″ source=»youtube» width=»425″ height=»344″ autoplay=»no»]
…………………………………………………………………………………………………………………………………………………………………………………………………………………………………
[vsw id=»WrAPE8-zFnc» source=»youtube» width=»425″ height=»344″ autoplay=»no»]…………………………………………………………………………………………………………………………………………………………………………………………………………………………………
[vsw id=»dxLOlqG2akM» source=»youtube» width=»425″ height=»344″ autoplay=»no»]……………………………………………………………………………………………………………………………………………………………………………….
[vsw id=»Kyb4gZAabEY» source=»youtube» width=»425″ height=»344″ autoplay=»no»]