Грузоподъемные машины, как правило, имеют машинный привод: от двигателей внутреннего сгорания, электрический, гидравлический и пневматический.
Привод от двигателей внутреннего сгорания не зависит от внешних источников энергоснабжения и получил широкое применение в передвижных кранах на колесно-рельсовом и пневмоколесном ходу, работающих на территории завода. Двигатели внутреннего сгорания имеют характерные особенности: невозможность реверсирования и запуска под погрузкой, отсутствие перегрузочной способности и др.
Эти особенности учитывают при проектировании и эксплуатации подъемно-транспортных машин с двигателями внутреннего сгорания. Так, например, мощность двигателя внутреннего сгорания выбирают с некоторым запасом по отношению к максимальному моменту, возникающему при пуске механизмов; в трансмиссии предусматривают механический реверс и муфту сцепления. Для плавного включения механизмов устраивают фрикционы. Все это усложняет конструкцию машин с приводом от двигателей внутреннего сгорания. Поэтому в передвижных кранах все большее применение получает дизель-электрический привод, в котором двигатель внутреннего сгорания приводит во вращение генератор. Механизмы крана приводятся в действие электродвигателями, которые питаются током от генератора. Кинематическая схема механизмов на кранах с дизель-электрическим приводом получается более простой и более надежной в эксплуатации.
Пневматический привод применяется в некоторых типах быстродействующих подъемников для обслуживания рабочих мест при изготовлении керамических и стекольных изделий.
Гидравлический привод применяется в автопогрузчиках и некоторых конструкциях кранов, устанавливаемых на грузовых автомобилях. Пневматические и гидравлические двигатели являются вторичными и получают энергию от основного двигателя (электродвигателя, двигателя внутреннего сгорания через промежуточное звено—насосы, компрессоры.
Наибольшее распространение в грузоподъемных машинах на заводах строительных материалов получил электрический привод переменного тока. Основными преимуществами электрического привода являются простота управления, возможность установки отдельных двигателей для каждого из исполнительных механизмов, легкость управления и регулирования.
Мощность подъемного механизма при установившемся движении

Аналогично определяют и мощность двигателя ходового механизма, но вместо веса груза и скорости подъема в формулу (96) подставляют сопротивление передвижению в н и скорость перемещения в м/сек.
Согласно вычисленной мощности по каталогу выбирают соответствующий двигатель и выписывают его характеристику (N, n).
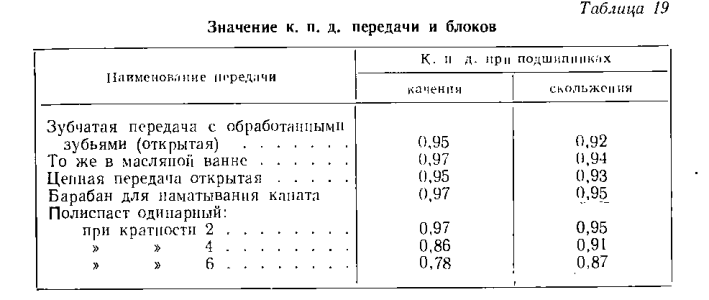
Когда двигатель выбран, определяют передаточное число механизма привода

η— к. п. д. отдельных передач, которые можно принимать по табл. 19.
При пуске электродвигатель преодолевает не только статические сопротивления, но и сообщает ускорение поступательно движущимся и вращающимся массам, поэтому пусковой момент больше статического.
Известно, что при поступательном движении динамическая нагрузка

Для вращательного движения

Механизмы крана представляют систему, состоящую из нескольких валов, на которых расположены разные массы, вращающиеся с различной скоростью. Поэтому при расчетах массы, вращающиеся на отдельных валах системы, приводят к одному из них, обычно валу двигателя.
При приведении маховых масс исходят из положения, что кинетическая энергия приведенной массы, отнесенная к одному из валов, равна кинетической энергии системы.
Прн наличии в системе т вращающихся валов, обладающих моментами инерции Iдв, I1,I2………Im и угловыми скоростями ωдв, ω1. ω2……. ωm., можно написать
 откуда момент инерции, приведенный к валу двигателя,
откуда момент инерции, приведенный к валу двигателя,
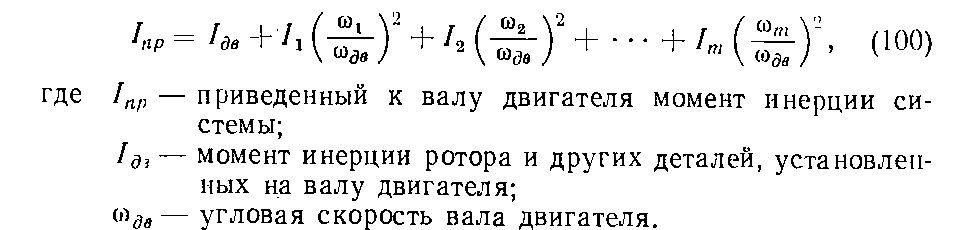 Из уравнения (100) видно, что после первого последующие члены ряда быстро убывают. Поэтому при практических расчетах обычно детально вычисляют момент инерции ротора электродвигателя и других деталей, установленных на быстроходном валу, а остальные вращающиеся массы учитывают коэффициентом
Из уравнения (100) видно, что после первого последующие члены ряда быстро убывают. Поэтому при практических расчетах обычно детально вычисляют момент инерции ротора электродвигателя и других деталей, установленных на быстроходном валу, а остальные вращающиеся массы учитывают коэффициентом
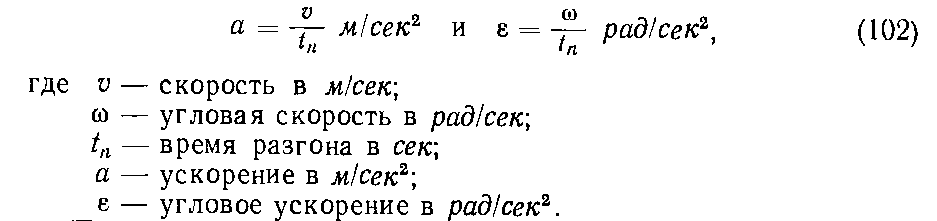
 При расчете грузоподъемных машин с некоторым приближением считают, что во время пуска имеет место равномерно ускоренное движение. Тогда
При расчете грузоподъемных машин с некоторым приближением считают, что во время пуска имеет место равномерно ускоренное движение. Тогда
 Пусковой момент на валу двигателя
Пусковой момент на валу двигателя
![]() Для подъемного механизма на основании формул (97) и (98)
Для подъемного механизма на основании формул (97) и (98)

Электродвигатели грузоподъемных машин допускают кратковременную перегрузку. Поэтому двигатель обычно выбирают по статическому моменту и проверяют на перегрузку при пуске.
Перегрузка двигателя при пуске не должна превышать допускаемой
 В подъемных механизмах нормализованных мостовых кранов динамическая нагрузка составляет около 30% от статической. С учетом допускаемой перегрузки необходимая мощность двигателя подъемного механизма может быть предварительно определена по формуле
В подъемных механизмах нормализованных мостовых кранов динамическая нагрузка составляет около 30% от статической. С учетом допускаемой перегрузки необходимая мощность двигателя подъемного механизма может быть предварительно определена по формуле
![]() Двигатель внутреннего сгорания не допускает перегрузки, поэтому его мощность выбирают по максимальному пусковому моменту, определяемому по формуле (109)
Двигатель внутреннего сгорания не допускает перегрузки, поэтому его мощность выбирают по максимальному пусковому моменту, определяемому по формуле (109)
![]()
 Пример. Определить мощность электродвигателя и передаточное число редуктора подъемной лебедки мостового крана грузоподъемностью G = 50 000 н (5000 кгс). Полиспаст сдвоенный; грузовая кратность полиспаста т = 4; скорость подъема v = 0,25 м/сек; диаметр барабана 0,4 м; продолжительность пуска tn = 1,0 сек; ток переменный напряжением 380 в, режим работы крана средний.
Пример. Определить мощность электродвигателя и передаточное число редуктора подъемной лебедки мостового крана грузоподъемностью G = 50 000 н (5000 кгс). Полиспаст сдвоенный; грузовая кратность полиспаста т = 4; скорость подъема v = 0,25 м/сек; диаметр барабана 0,4 м; продолжительность пуска tn = 1,0 сек; ток переменный напряжением 380 в, режим работы крана средний.
К.п. д. механизма η= 0,8; вес крюковой подвески не учитываем.
Необходимая мощность электродвигателя (формула 108)

Выбираем по каталогу электродвигатель с фазовым ротором типа МТБ 311-6 на [напряжение 380/220 в, мощность 11 квт при ПВ 25%, п= 945 об/мин; (91 рад/сек) GD2 = 0,9 кгм2.
Кратность максимального момента [k] = 2,3.