Драйверы шаговых двигателей
Драйверы серво-шаговых двигателей
Драйвер (англ. driver — управляющее устройство, водитель) — электронное устройство, предназначенное для преобразования электрических сигналов, целью которого является управление чем-либо. Драйвером обычно называется отдельное устройство или отдельный модуль, микросхема в устройстве, обеспечивающие преобразование электрических управляющих сигналов в электрические или другие воздействия, пригодные для непосредственного управления исполнительными или сигнальными элементами.
В современной автоматике, да и в бытовой технике, зачастую двигатель или электромагнит включается не выключателем, а контроллером. Скоростью вращения, направлением позволяют управлять логические устройства с формирователями на выходе — силовыми драйверами. Входы такого драйвера совместимы с логическим устройством, а на выходе формируется необходимое напряжение нужной полярности и, в случае шагового двигателя, необходимая циклограмма возбуждения его обмоток.
Дополнительные функции драйверов шаговых двигателей.
В огромном выборе драйверов шаговых двигателей, что есть сейчас на рынке, несложно запутаться. Тем более, когда продавцы стараются написать побольше текста и страшных слов в описание продукта. Тем начинающим конструкторам, кого длинные списки с перечислением «расширенных функций» и всяких опций сбивают с толку при принятии решения, призвана помочь данная статья. Здесь описаны наиболее часто встречающиеся опции, а также дана субъективная оценка реальной нужности такой функции(или отсутствия таковой).
Начнем с самых распространенных:
ОПТОИЗОЛИРОВАННЫЕ ВХОДЫСейчас сложно встретить драйвер, в котором входы не изолированны гальванически от остальной части, и производители упоминают об оптоизоляции больше для проформы. Драйвер — устройство силовое, на входе у него маломощные сигналы, как правило 0..5 В, и током не более 50-100 мА, тогда как в драйвере коммутируются напряжения на порядок больше, иногда до 100-200 В, и токи бывают немалые — до 5-8А. В случае отсутствия оптопар на входе, при пробое силовой части эта энергия может устремиться в виде тока обратно по входным проводам, и повредить контроллер и подключенные к нему устройства. Поэтому защитная опторазвязка — строго обязательная часть любого нормального драйвера.
МИКРОШАГ И МАКСИМАЛЬНАЯ ЧАСТОТА ВХОДНЫХ ИМПУЛЬСОВ
Микрошаговый режим сам по себе, несомненно, полезная функция. Вопрос в том, можно ли использовать максимальное деление шага как аргумент при выборе драйвера. Иногда кажется, что производители соревнуются, кто больше делений шага сможет зашить в устройство. Многие фирмы предлагают драйверы, позволяющие делить шаг на 512 микрошагов. Для того, чтобы в таком режиме вращать вал со скоростью 20 об/сек(а это вполне нормальная скорость для качественных двигателя и драйвера), потребуется подавать импульсы STEP с частотой 512*200*20 = 2 Мгц. Тогда как сам драйвер обычно способен отрабатывать импульсы на частоте не более 200-300 кГц. Соответственно, если Вы используете деление шага 1/512 то быстрее чем 2 об/сек двигатель раскрутить не удастся — это в том случае, если Ваш контроллер может выдавать импульсы с частотой 300 кГц. Многие контроллеры ограничены частотой 100-150 кГц, и менее. Следовательно, в реальных задачах имеет смысл использовать микрошаг порядка 1/32 или 1/64, большие деления — удел очень узкоспециальных применений. Мы рекомендуем не смотреть на максимальное деление шага при выборе драйвера, но желательно, чтобы драйвер позволял работать в диапазонах деления шага 1/2 — 1/64. Компания Purelogic выпускает одноканальные и многоканальные драйверы ШД с диапазоном деления шага от 2 до 64.
ФУНКЦИЯ ПОДАВЛЕНИЯ РЕЗОНАНСА
Она же функция компенсации резонанса, она же функция устранения среднечастотной нестабильности. Шаговые двигатели подвержены резонансу — такова их конструктивная особенность. Чем сильнее резонирует вал двигателя, тем меньший крутящий момент двигатель отдает. В 80% случаях прохождения частоты резонанса — вал останавливается. Функция подавления резонанса — помогает уменьшить негативный эффект резонанса. Этой функцией оснащены на самом деле очень мало драйверов шаговых двигателей, самые известные примеры — это драйверы Purelogic, Geckodrive и Leadshine серий DM, EM. Технологии, которые используют производители, не раскрываются, но примерно известно, что возникновение резонанса отслеживается по колебаниям ЭДС индукции, возникающим в обмотках двигателя от резонирующего ротора, после чего ПО драйвера определяет стратегию его устранения. Функция подавления резонанса достаточно полезна, и польза её растет вместе с нагрузкой на двигатель и его размером — если для двигателей 42 и 57 мм это не так существенно, то работать с 86 двигателями без такой функции уже может быть неприемлемо. Следует упомянуть, что алгоритмы подавления резонанса в блоках управления Purelogic и Geckodrive — автоматические, не требуют настройки и подобраны под конкретные типоразмеры двигателей во всем диапазоне частот. Именно поэтому Purelogic выпускают драйверы под конкретные типоразмеры ШД — PLD330 для PL42 (NEMA17), PLD440/PLD545/PLD57 для PL57 (NEMA23), PLD880/PLD86 для PL86 (NEMA34) и PLD8220 для PL110 (NEMA43). В драйверах Leadshine понадобится ручная настройка драйвера — подбор частот устранения резонанса (на выбор 3 диапазона частот) что делает эти драйверы более сложными и менее гибкими в настройке.
МОРФИНГ
Функция, впервые появившаяся в драйверах Geckodrive. В полном шаге каждая обмотка постоянно запитана полным током, а при использовании микрошагового режима — меняются по синусоидальным законам, со смещением фазы в 90 градусов. Это значит, что в режиме полного шага на ротор действует сила, складывающаяся из сил магнитного притяжения обеих обмоток статора, причем — обе этих силы максимальны(запитка полным током). В случае микрошага — две обмотки могут быть запитаны полным током только в тот момент, когда ротор проходит положение полного шага. Следовательно, момент в микрошаговом режиме — меньше чем в полу- или полношаговом. При быстром вращении, однако, можно объединять много микрошагов в один шаг — в самом деле, ротор имеет инерцию, и ни мгновенно разогнаться, ни мгновенно остановиться не может, а значит, скорость меняется плавно, и можно объединять микрошаги в полный шаг без существенной потери точности — а значит, запитывать обмотки полным током, и получать больший момент на высоких оборотах. Функция плавного перехода с микрошагового управления(синусоидальных токов) к полношаговому(запитке фаз полным током) и называется морфингом. Таково теоретическое обоснование данной функции. Драйверы Purelogic поддерживают технологию морфинга.
ПЛАВНЫЙ ПУСК ШАГОВЫХ ДВИГАТЕЛЕЙ
При подаче питания на блоки управления, ток в обмотки подается обычно просто — полным напряжением и затем отсечка по достижению нужного значения тока. Поскольку до подачи тока ротор находится неизвестно где, то в момент подачи он приходит в положение равновесия рывком — это слышно при включении питания, раздается характерный «удар». При плавном пуске напряжение питания возрастает постепенно, и вал двигателя подтягивается тоже постепенно, без удара. В целом, это благотворно сказывается на механике. Все драйверы Purelogic имеют функцию плавного запуска ШД.
СНИЖЕНИЕ ТОКА ФАЗ ПРИ ПРОСТОЕПри простое (отсутствии управляющих сигналов) драйвер может снижать ток в обмотках до установленного значения. Это позволяет уменьшить нагрев шагового двигателя и экономить энергию. Все драйверы Purelogic имеют функцию AUTO-SLEEP — снижение тока в обмотках ШД при простое.
Источник http://purelogic.ru/
……………………………………………………………………………………………………………………………………………………………………………………………………………..
Настройка драйверов Leadshine серий DM,EM,AM
Расширенная настройка блоков управления шаговыми двигателями Leadshine
Как известно, драйверы шаговых двигателей компании Leadshine серий AM, EM и DM обладают рядом уникальных функций.
Однако, чтобы воспользоваться преимуществами этих функций в полной мере, драйверы необходимо настроить. Выполняется настройка с помощью специального фирменного ПО — ProTuner. Для настройки потребуется компьютер под управлением Windows, оснащенный COM-портом, а также кабель Leadshine RS232-RJ12.
Подключаем драйвер к COM-порту компьютера с помощью кабеля, устанавливаем ProTuner на компьютер, подаем питание на драйвер.
После запуска ProTuner будет предложено выбрать COM-порт для установки связи с драйвером. Номер порта можно посмотреть в диспетчере устройств:
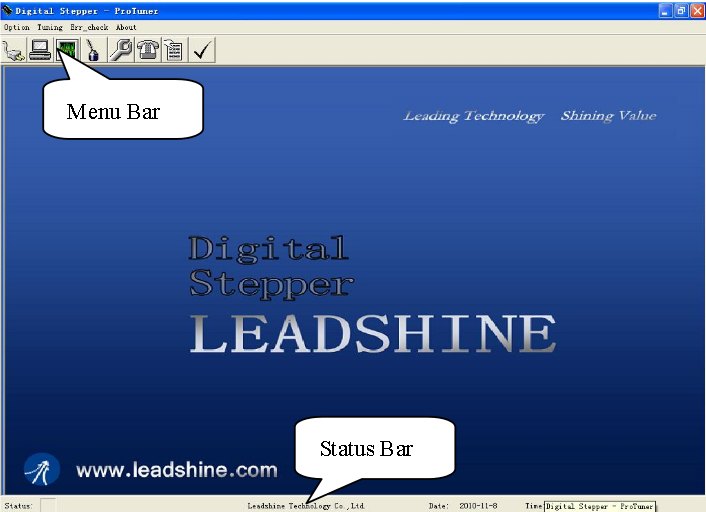
После успешного запуска будет показано основное меню ProTuner:
Настройка контура регулирования обмоток шагового двигателя
Настройка драйвера начинается с пункта меню Tuning, где настраиваются параметры ПИ-регулятора уровня тока в обмотках двигателя. На графике отражается изменение тока во времени, оранжевая линия показывает эталонный уровень тока, зеленый — реальный ток. В идеале график должен быть правильной прямоугольной формы. Значение I-test задает требуемый уровень тока — он должен быть равен рабочему току обмоток двигателей.
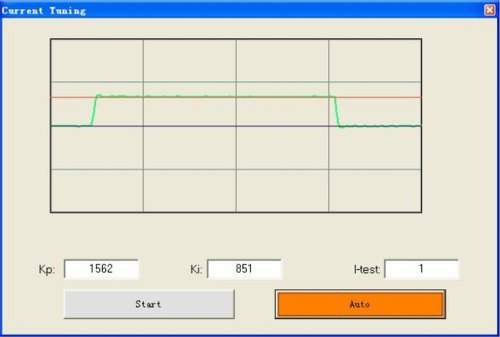
Настройка ПИ-регулятора заключается в подборе двух параметров — пропорционального Kp и интегрального Ki.
Пропорциональный коэффициент Kp соответствует названию — результат его влияния в том, что чем больше разница между нужным уровнем тока и реальным током обмотки, тем быстрее происходит изменение тока драйвером. Большие значения пропорционального окэффициента приводят к возникновению колебаний в регулируемом процессе.
Интегральный коэффициент обладает сглаживающим эффектом, и устраняет т.н. статическую ошибку. Слишком малые значения Ki приводят к тому, что статическая ошибка не компенсируется до конца, слишком большие значения приводят к тому, что уровень тока «плавает» вокруг необходимого значения.
Ниже пример неудачно настроенного контура. Слишком маленький пропорциональный коэффициент Kp привел к тому, что ток слишком медленно меняется, причем скорость изменения падает по мере приближения к заданному уровню, а интегральный коэфициент Ki=15 оказался недостаточен для компенсации статической ошибки — в результате ток так и не достигает нужного уровня за шаг.
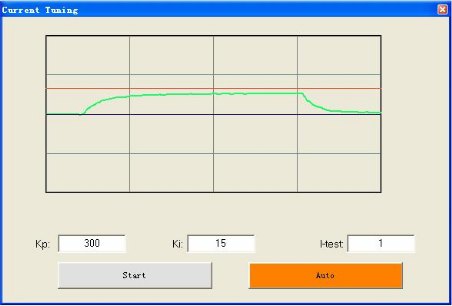
Можно также воспользовать функцией автоматического подбора параметров, нажав кнопку Auto. При этом драйвер самостоятельно протестирует обмотки и выберет подходящие коэффициенты. Именно это происходит при вкл/выкл переключателя SW4(см. документацию на AM882).
Примечание. Производитель рекомендует настраивать параметры на ненагруженном двигателе.
Настройка основных параметров драйвера
После настройки контура тока можно перейти к настройке продвинутых фукнций драйверов Leadshine. Они настраиваются в окне System Config:
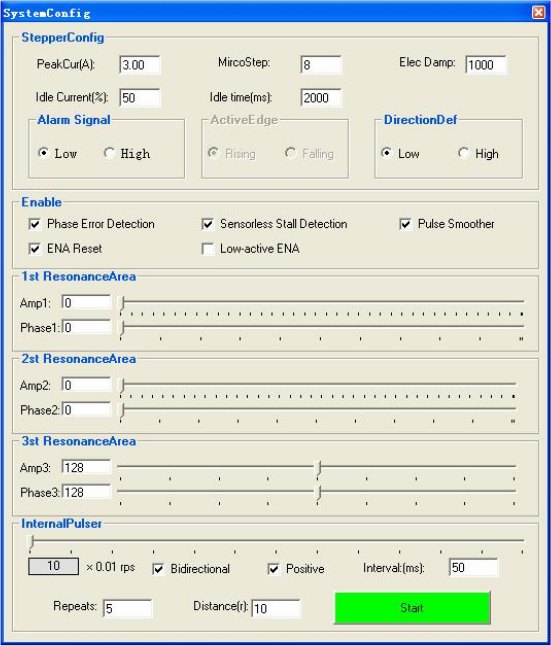
PeakCur(A) — пиковый ток в обмотке шагового двигателя. Обратите внимание, что производителями ШД указывается среднеквадратичное значение тока!
Microstep — если DIP-переключатели установлены нужным образом(см. документацию на драйвер), можно задать точное деление шага с помощью этого параметра.
Elec Damp — «коэффициент электронного демпфирования». Данное число используется как некий коэффициент в антирезонансных алгоритмах. Алгоритмы подавления резонанса Leadshine держутся в секрете, поэтому точное назначение параметра неизвестно, однако известно, что данный коэффициент полезен при устранении вибраций, а также есть рекомендация производителя — сперва настроить коэффициенты 3 резонансных областей со значением коэффициента по умолчанию, прежде чем переходить к подбору Elec Damp — возможно, подбор не потребуется.
Idle Current — величина тока удержания(при простое мотора) в % от рабочего тока.
Idle time — время простоя мотора, после истечения которого ток снижается до уровня, заданного предыдущим параметром.
Phase Error Detection — задает, будет ли драйвер диагностировать ошибки, связанные с функционированием обмоток мотора и выдавать сигнал аварии. Лучше всегда оставлять включенным.
Sensorless stall detection — функция определения момента остановки вала двигателя. При включенной функции драйвер постарается определить, когда произошел внезапный останов вала(вал заклинило или он остановился по другой причине, например из-за пропуска шагов) и выдаст сигнал аварии на выход ALM. Отключать данную функцию стоит только если есть подозрения на ложные срабатывания, а также если не планируется использовать выход аварии драйвера для остановки всего станка.
ENA Reset — при установленной галочке драйвер можно вывести из состояния «авария» без выключения питания, с помощью снятия-подачи сигнала ENABLE.
Low-active ENA — данная функция инвертирует уровеньсигнала ENABLE. Аналогично, уровни сигналов ALM и DIR выбираются соответствующими переключателями.
Pulse smoother — алгоритм сглаживания периода поступающих импульсов STEP. Назначение данной функции в том, чтобы немного сгладить негативные эффекты, связанные с нестабильностью входящих импульсов. Так, например, программа Mach3 генерирует сигнал на пинах LPT-порта с крайне большой дисперсией периода импульсов — такая неравномерность очень негативно сказывается на максимально достижимой скорости станка. Однако, данную функцию лучше отключить — работающий фильтр импульсов отключает мультистеппинг. Это особенность всех драйверов Leadshine, не является ошибкой, а осознанным решением производителя. Польза от мультистеппинга видится гораздо большей, чем от фильтра импульсов по той причине, что неравномерность STEP, генерируемых Mach3 настолько велика, что её не сгладить никаким фильтром, а вибрации ШД на низких частотах — очень серьезная проблема, которая почти полностью устраняется мультистеппингом:
Настройка параметров резонансных областей
В драйверах Leadshine AM,EM и DM выделены 3 диапазона скорости вращения ШД, в которых наиболее вероятно возникновение вибраций. Для их устранения предоставляется возможность настройки 2 параметров для каждой области — коррекция соотношения амплитуды тока обмоток и сдвиг фаз. Порядок настройки не регламентируется производителем, даются лишь несколько рекомендаций:
1) Производить настройку на ненагруженном моторе(без подсоединения приводного винта/ремня)
2) Все подстройки ползунками производить на предварительно четко выделенной резонансной частоте вращения.
Ниже описана методика, предлагаемая Михаилом Юровым.
С помощью встроенного генератора импульсов двигатель раскручивается до появления вибрации(первая резонансная область соответсвтвует скорости примерно 0.5-1.2 об/сек, вторая — 1.2-2.5 об/сек, третья 2.5-5 об/сек.)
Ползунок амплитуды перемещается таким образом, чтобы добиться максимальной вибрации, после чего легко подобрать частоту наибольшего резонанса. Зафиксировав частоту, используя ползунки коррекции амплитуды и сдвига фаз добиться максимально плавного движения(хотя бы на слух). После настройки на данной частоте — скорость вращения увеличивается до проявления вибрации в следующей области.
Источник http://darxton.ru
…………………………………………………………………………………………………………………………………………………………………………………………………
Драйверы серво-шаговых двигателей Leadshine
Драйверы серво-шаговых двигателей (шаговых двигателей с энкодером) торговой марки Leadshine (Китай). В отличии от сервопривода с применением щеточного DC или бесщеточного PMSM электродвигателя, сервопривод на базе ШД обладает более скоростным откликом на комманду и отсутствуем эффекта колебания ротора в точке останова (ротор не «рыскает»). В отличии от обычного привода с ШД без обратной связи, сервопривод на базе ШД исключает пропуск шагов и на высоких скоростях осуществляет прирост момента на 30%. Сервопривод на базе ШД имеет более высокую плавность хода, меньшие вибрации, шум и нагрев.
.
Драйвер ES-D508
Старое название HBS57. Драйвер серво-шагового двигателя (шагового двигателя с энкодером) 50В/8А/200кГц. Работает только с трехфазным ШД с энкодером, с ШД без энкодера не работает. Оптоизолированные входы управления STEP, DIR, ENABLE. Выбор режима работы STEP/DIR или CW/CCW. Настройка драйвера с ПК через RS232, автонастройка под ШД. Защита от КЗ обмоток ШД, от обратной ЭДС ШД, режим удержания ротора ШД.
Драйвер ES-D808
Старое название HBS86. Драйвер серво-шагового двигателя (шагового двигателя с энкодером) 80В/8.2А/200кГц. Работает только с двухфазным ШД с энкодером, с ШД без энкодера не работает. Оптоизолированные входы управления STEP, DIR, ENABLE. Выбор режима работы STEP/DIR или CW/CCW. Настройка драйвера с ПК через RS232, автонастройка под ШД. Защита от КЗ обмоток ШД, от обратной ЭДС ШД, режим удержания ротора ШД.
Драйвер ES-D1008
Драйвер серво-шагового двигателя (шагового двигателя с энкодером) 100В(DC)/70В(AC)/8.2А /200кГц. Работает только с двухфазным ШД с энкодером, с ШД без энкодера не работает. Оптоизолированные входы управления STEP, DIR, ENABLE. Выбор режима работы STEP/DIR или CW/CCW. Настройка драйвера с ПК через RS232, автонастройка под ШД. Защита от КЗ обмоток ШД, от обратной ЭДС ШД, режим удержания ротора ШД.